自主研发了全流程的核心工业机器人。
EC系列七轴机器人
ED系列桁架机器人
EH系列桁架机器人
E系列桁架机器人
R系列旋转机器人
T系列桁架机器人
我们的努力,都是为了在每一个关键点上,让机器人更智能,让客户更放心,让企业更高效。
缸体缸盖自动生产线
轮毂生产线
被动锥齿轮自动线
刹车盘自动化加工单元
触头座自动化生产线
缸体缸盖铸造生产线
工业机器人实训室设备
减震轮自动化加工生产线
轮毂轴承自动化加工生产线
汽车刹车盘自动化生产线
支重轮自动化加工生产线
柱塞套加工生产线
J9九游会数字孪生系统是一款集建模真、大数据展示、机器智能优化于一体的全流程高效平台。
建模仿真平台
数据监控系统
AGV调度软件
WMS软件
WCS软件
智能管控平台
公司研发实力雄厚,自建工业自动化生产基地,致力于成为能实现客户梦想的机器人系统服务提供商。
装备园区
研发团队
质量管理
公司始终坚持“致力于成为能实现客户梦想的机器人系统服务提供商”的服务愿景,秉承不断创新的价值观,为客户提供高品质服务。
企业文化
人才战略
招贤纳士
安全管理
为制造企业实现数字化、智能化和一体化的智能制造提供适合您的解决方案。
公司简介
新闻动态
联系我们
2025-04-15
机器人手臂的自由度是指其能够独立运动的关节数量。自由度越多,手臂的灵活性和操作能力就越强。例如,人类手臂具有7个自由度(肩关节3个,肘关节1个,腕关节3个),这使得我们能够执行复杂的动作。而机器人手臂的自由度则根据设计需求和应用场景有所不同,常见的有四自由度、五自由度甚至更多。四自由度机器人手臂已经能够高效地完成抓取、放置和分拣任务,其关键组件如基座、关节和臂部的设计都需经过精密计算和优化。据《4
查看更多
Q版机器人手臂的设计,首要考虑的便是其结构的趣味性与实用性。不同于传统工业机器人手臂的严谨与冷峻,Q版设计更注重形态的可爱与活泼,以吸引更多用户的目光。例如,手臂的形状可以模仿动物爪子、卡通人物的手型等,通过圆润的线条和鲜艳的色彩搭配(pèi),营(yíng)造(zào)出(chū)轻(qīng)松(sōng)愉(yú)悦的视觉感受。在实用性方面,Q版机器人手臂同样不容小觑。虽然体积小巧,但它们依
2025-04-14
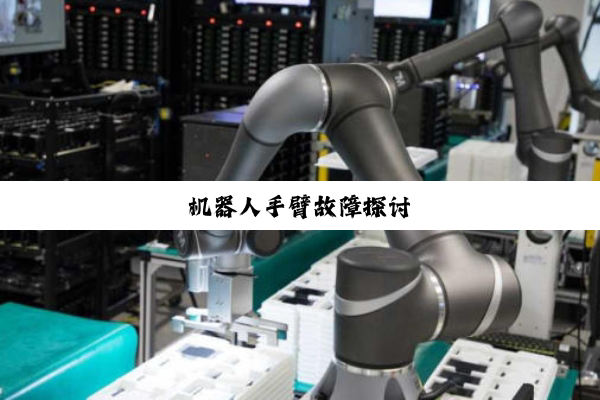
伺服系统是机器人手臂运动控制的核心,一旦出现故障,往往会导致机器人手臂无法正常工作。伺服系统故障的常见原因包括电机驱动器故障、编码器异常以及电缆松动等。以库卡机器人为例,当出现KSS0021报警信息时,通常意味着第二电机电缆可能未正确连接或存在连接错误。此时,需要检查第二电机电缆和KPS X114,pin7的返回信号,确保它们处于正确的连接状态。此外,KSS0102报警信息则提示检测信号线失灵,可
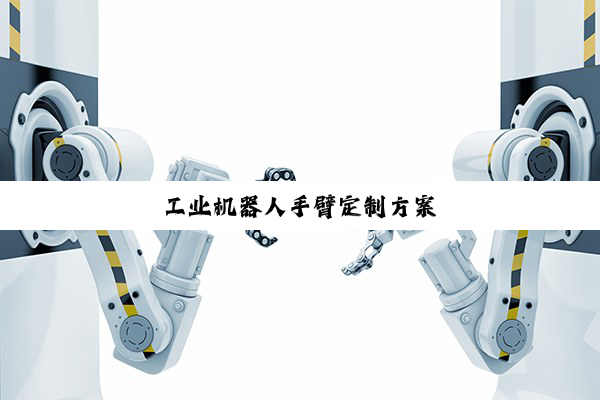
工业机器人手臂的定制方案首先需要考虑其核心要素,包括自由度、定位精度、工作范围、最大工作速度(dù)以(yǐ)及(jí)承(chéng)载(zài)能(néng)力(lì)。这(zhè)些(xiē)参(cān)数(shù)直(zhí)接(jiē)决(jué)定(dìng)了(le)机(jī)器(qì)人(rén)手(shǒu)臂(bì)的(de)性(xìng)能(néng)与(yǔ)适(shì)用
2024
佛山机器人手臂的价格因类型、品牌、配置及性能的不同而差异显著。从几千元到几十万元不等,涵盖了各种应用场景。例如,广东天太机器人有限公司提供的天太四轴SCARA机器人,价格约为25,300元,适用于自动化上下料、搬运等任务。而广东钜泽机器人有限公司的打磨抛光二合一机械臂,价格高达185,000元,因其集成了打磨与抛光双重功能,适🌅用于精密加工领域。这些价格数据反映了佛山机器人手臂市场的丰富多
研磨机器人手臂技术涉及多个核心要点,其中最为关键的在于位置控制与接触力控制。首先,机器人手臂必须能够精确控制其运动轨迹,以确保研磨工具能够按照预定的路径进行作业。根据数据,现代研磨机器人的重复定位精度普遍达到了0.02mm,绝对定位精度达到0.5mm,这为高精度研磨作业提供了坚实的基础。其次,由于研磨作业需要对机械手与环境之间的接触力进行精确控制,因此,机器人系统需要具备一定的柔性,以应对磨削过程
机器人手臂焊接技术最显著的优势之一在于其高度的精准度和效率。在焊接过程中,机器人手臂能够精确地控制焊接的位置、角度和速度,确保每一个焊点都符合严格的质量标准。例如,在汽车制造行业,机器人手臂焊接已成为主流的焊接方式。汽车车身由众多复杂的零部件组成,对焊(hàn)接(jiē)的(de)精(jīng)度(dù)和(hé)强(qiáng)度(dù)要(yào)求(qiú)极(jí)高(gāo)。机(jī
ROS是一个专为机器人设计的开源操作系统,它提供了丰富的功能包和工具,涵盖了从感知、控制到导航、可视化的几乎所有机器人领域。在机器人手臂控制方面,ROS通过集成化的开发平台,如MoveIt!,实现了运动规划、操作控制、3D感知、运动学求解以及导航算法等功能。MoveIt!是ROS中一个重要的功能包,自2024年推出以来,已经成为ROS社区中使用度排名前三的功能包之一,广泛应用于工业、商业和研发领域
手臂摆动机器人的制作基于复杂的机械设计与先进的电子控制技术。其核心在于精密的伺服🎨电机驱动系统,这些电机通过编码器反馈位置信息,确保每一次摆动的精确无误。据最新研究显示,采用闭环控制算法的手臂摆动机器人,其定位精度可达到0.01毫米级别,远高于一般工业机器人的平均水平。此外,利用人工智能算法优化运动轨迹,使得机器人在执行复杂任务时更加流畅高效。二、关键技术创新与应用实例近年来,随着深度学习
机械藤蔓手臂是《原神》须弥地区特有的机关装置,通常由多个精密的机械部件组成。这些手臂能够根据玩家的操作进行移动、抓取或释放物品等动作。据游戏内部数据显示,机械藤蔓手臂的抓取力可达数百公斤,足以移动大多数游戏内的物品。在某些场景中,玩家需要通过与机械藤蔓手臂互动,解决谜题、获取隐藏物品或打开通路。例如,在特定的机关处,玩家需要控制机械藤蔓手臂移动到指定位置,以激活隐藏的开关或打开宝箱。二、机械藤蔓手
钳机器人手臂以其高精度📀j9九游会首页和灵活性,在精密装配领域大放异彩。据《2024年全球工业机器人市场报告》显示,采用钳机器人手臂进行电子元件、汽车零部件等高精度装配的企业,生产效率平均提升了30%,同时产品不良率降低了25%。例如,在智能手机组装线上,钳机器人能以微米级的精度完成屏幕与机身的贴合,确
机器人手臂开门的技术基础在于其柔顺性和精确的控制系统。传统的刚性机械手臂由于自由度有限且缺乏灵活性,往往难以胜任这种任务。柔顺性机械手臂则通过采用柔性材料和先进控制算法,实现了更高的灵活性和适应性。例如,中国科学技术大学教授陈小平团队研发的柔性机器人手臂,采用了蜂巢气动网络结构,具有几十个自由度,能够灵活弯曲和运动,成功实现了开门、开抽屉等复杂操作。这一成果发表在《国际机器人研究杂志》上,展示了柔
完善您的信息,J9九游会专业团队为您提供服务!
姓名 *
电话 *
公司名称 *
所属行业*
项目所在城市 *
需求描述 *