自主研发了全流程的核心工业机器人。
EC系列七轴机器人
ED系列桁架机器人
EH系列桁架机器人
E系列桁架机器人
R系列旋转机器人
T系列桁架机器人
我们的努力,都是为了在每一个关键点上,让机器人更智能,让客户更放心,让企业更高效。
缸体缸盖自动生产线
轮毂生产线
被动锥齿轮自动线
刹车盘自动化加工单元
触头座自动化生产线
缸体缸盖铸造生产线
工业机器人实训室设备
减震轮自动化加工生产线
轮毂轴承自动化加工生产线
汽车刹车盘自动化生产线
支重轮自动化加工生产线
柱塞套加工生产线
J9九游会数字孪生系统是一款集建模真、大数据展示、机器智能优化于一体的全流程高效平台。
建模仿真平台
数据监控系统
AGV调度软件
WMS软件
WCS软件
智能管控平台
公司研发实力雄厚,自建工业自动化生产基地,致力于成为能实现客户梦想的机器人系统服务提供商。
装备园区
研发团队
质量管理
公司始终坚持“致力于成为能实现客户梦想的机器人系统服务提供商”的服务愿景,秉承不断创新的价值观,为客户提供高品质服务。
企业文化
人才战略
招贤纳士
安全管理
为制造企业实现数字化、智能化和一体化的智能制造提供适合您的解决方案。
公司简介
新闻动态
联系我们
2025-05-01
三维机器人手臂是机器人技术领域中得到最广泛实际应用的自动化机械装置之一。随着材料科学、传感器技术和人工智能算法的不断突破,三维机器人手臂已经实现了智能化、柔性化的变革。新型材料让机械手臂更轻巧坚固,具备更强的负载能力和运动灵活性;高精度传感器赋予它们敏锐的感知能力,使其能够实时感知工作环境的变化,做出精准反应;先进的人工智能算法则让机械手臂拥有了“思考”能力,能够自主规划运动路径,自适应复杂的生产
查看更多
2025-04-30
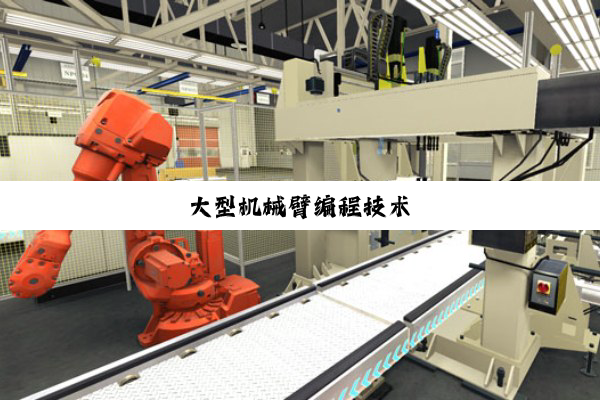
大(dà)型(xíng)机(jī)械(xiè)臂(bì)编(biān)程(chéng)技(jì)术(shù)的(de)基(jī)础(chǔ)在(zài)于(yú)对(duì)机(jī)器(qì)人(rén)运(yùn)动(dòng)学(xué)的(de)理(lǐ)解(jiě)和(hé)应(yīng)用(yòng)。机(jī)器(qì)人(rén)运(yùn)动(dòng)学(xué)涉(shè)及
机器人手臂的设计草图是其制造和组装的基础,包含了多个关键要素。首先,设计草图会详细说明机械手臂的基本结构,如臂杆、关节、伺服电机和驱动器等部件的尺寸、材料和安装方式。例如,在四🥔自由度(4-DOF)机器人手臂的设计中,每个关节的运动范围都需要精确计算,以确保手臂能够覆盖所需的工作空间。据行业数据显示,一个典型的4-DOF机器人手臂的工作半径可达1.5米,能够满足大多数工业自动化任务的需求。
杭州唯精医疗机器人有限公司无疑是该领域的佼佼者。公司自主研发的12自由度从手机械臂,不仅在国内首创性地增加了冗余关节结构和力觉虚拟夹具技术,还实现了机械臂的超宽工作范围。这一创新产品如同医生的智能“助手💊J9九游”,能在关键时刻“拦住”医生的动作,避免手术中对重要器官的误伤,从而极大地提升了手术的安全性。据统计,唯精医疗的四臂腹腔镜手术机器人已完
2024
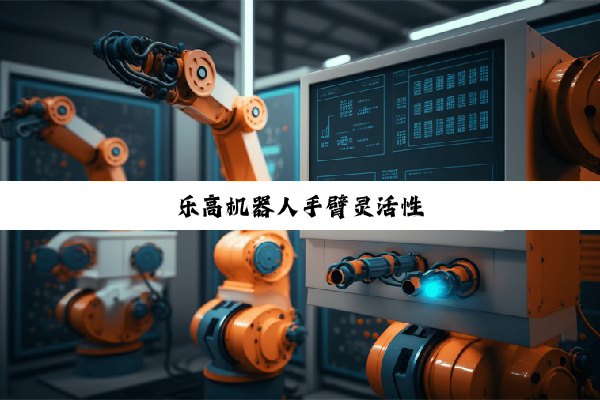
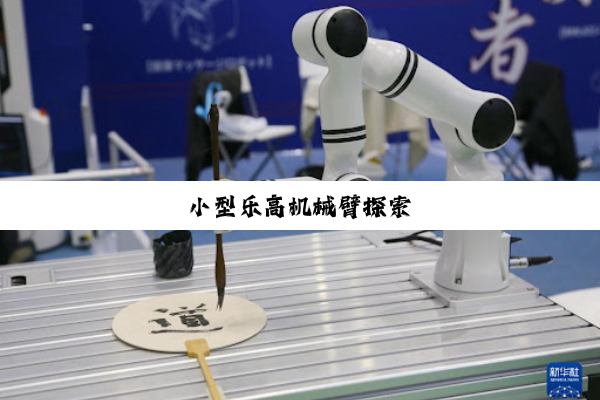
乐(lè)高(gāo)WeDo机(jī)器(qì)人(rén)系(xì)列(liè)最(zuì)新(xīn)推(tuī)出(chū)的(de)小(xiǎo)颗(kē)粒(lì)版(bǎn)《机(jī)械(xiè)臂(bì)》,通(tōng)过(guò)编(biān)程(chéng)控(kòng)制(zhì),进(jìn)一(yī)步(bù)丰(fēng)富(fù)了(le)学(xué)生(shēn
小型乐高机械臂的设计主要基于机械学中的杠杆原理、齿轮传动及连杆机构等。通过巧妙组合这些基本机械元素,可以实现机械臂的多种动作和功能。乐高机械臂通常由基座、手臂和手指等部分组成。基座提供稳定的支撑,手臂负责机械臂的伸展和弯曲,手指则实现抓取和释放动作。例如,乐高WeDo机器人系列中的小颗粒版《机械臂》,采用了高精度的传感器和伺服电机,使得机械臂在执行任务时能够实现更高的灵活性和实时反馈。这种设计不仅
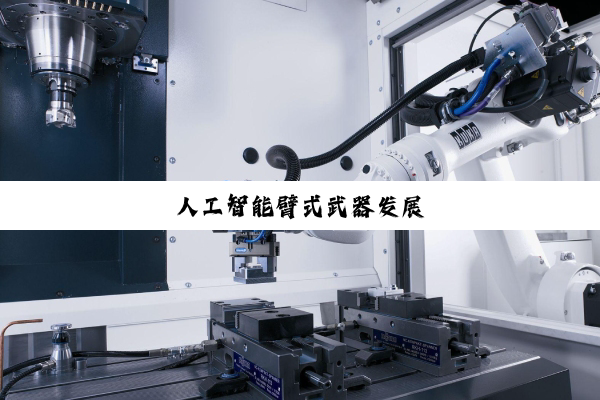
早在20世纪50年代,美国科学家费根鲍姆便开始了计算机在军事领域应用的研究,这为智能武器装备的发展奠定了基础。随着计算机技术和人工智能理论的🧩不断成熟,AI武器装备逐渐从理论走向实践。现代机械手臂采用轻质高强度的材料如碳纤维和钛合金,内置高精度传感器和复杂的关节设计,确保其轻便耐用且能模拟人类手臂的灵活性和精确度。例如,斯坦福AI和机器人实验室打造的自适应机械臂Rizon(拂晓),作为世界
APEX机器人手臂技术最显著的特点是其高度的灵活性和智能化。这些机器人手臂通常配备有多个关节和传感器,能够模拟人类手臂的各种复杂动作。例如,在汽车制造行业中,APEX机器人手臂被广泛应用于焊接、装配和喷涂等工序,其工作效率和精度远超传统手工操作。据统计,使用APEX机器人手臂的生产线,其生产效率可以提高30%以上,同时大幅降低次品率。二、APEX机器人手臂技术的最新应用近年来,APEX机器人手臂技
承重能力,通常指工业机器人在六轴上的有效承载能力,是机器人所能承受的重量,数值上等于部件重量和臂端工具重量之和。这一数据不仅决定了机器人能否完成特定任务,还关系到其运行的安全性和稳定性。影响机器人手臂承重能力的因素包括材料性能、结构设计和电机控制系统。新型高强度合金和复合材料的应用,以🆚及结构设计的优化,都能显著提升机器人手臂的承重能力。2. 承重计算中的关键参数进行机器人手臂承重计算时,
工业机器人的组装过程是一个复杂而精密的工程,主要包括机械结构和控制系统的装配。机械结构包括基座、臂部、腕部和手部等关键部件,这些部件之间的精度和配合度至关重要。例如,减速器和伺服电机等关键部件需要经过严格的检测和调试,以确保其性能和质量。控🔴制系统则相当于机器人的大脑,负责控制其运动轨迹、速度和加速度等参数。在组装过程中,需要选择合适的控制器、传感器和执行器,并进行精确的校准和调试。二、工
同花顺金融研究中心12月27日讯,有投资者向新兴装备提问, 请问贵公司的智能机器人都分为哪些类型?后续公司智能机器人是以轮足为主还是以人形机器人为主?公司为何迟迟不发布第一带智能机器人产品? 公司回答表示,尊敬的投资者您好,公司全资子公司北京长兴动力🍈机器人科技有限公司研制的智能机器人目前分为轮足机器人与双足机器人两大类。该公司研发的第一代智能机器人整机为轮足机器人,其1.0版本已初步达到
1. **企业概览**: 注册号掩映于星号之下,宛如企业神秘面纱的一角。其植根于繁华的上海市,注册资本高达200万人民币,彰显了企业的雄厚实力。史维华先生,作为企业法定代表人,以其卓越的领导力引领公司稳步前行。这是一家自然人投资或控股的有限责任公司,于青浦区市场监督管理局正式🌸j9九游会首页登记,存
完善您的信息,J9九游会专业团队为您提供服务!
姓名 *
电话 *
公司名称 *
所属行业*
项目所在城市 *
需求描述 *