自主研发了全流程的核心工业机器人。
EC系列七轴机器人
ED系列桁架机器人
EH系列桁架机器人
E系列桁架机器人
R系列旋转机器人
T系列桁架机器人
我们的努力,都是为了在每一个关键点上,让机器人更智能,让客户更放心,让企业更高效。
缸体缸盖自动生产线
轮毂生产线
被动锥齿轮自动线
刹车盘自动化加工单元
触头座自动化生产线
缸体缸盖铸造生产线
工业机器人实训室设备
减震轮自动化加工生产线
轮毂轴承自动化加工生产线
汽车刹车盘自动化生产线
支重轮自动化加工生产线
柱塞套加工生产线
J9九游会数字孪生系统是一款集建模真、大数据展示、机器智能优化于一体的全流程高效平台。
建模仿真平台
数据监控系统
AGV调度软件
WMS软件
WCS软件
智能管控平台
公司研发实力雄厚,自建工业自动化生产基地,致力于成为能实现客户梦想的机器人系统服务提供商。
装备园区
研发团队
质量管理
公司始终坚持“致力于成为能实现客户梦想的机器人系统服务提供商”的服务愿景,秉承不断创新的价值观,为客户提供高品质服务。
企业文化
人才战略
招贤纳士
安全管理
为制造企业实现数字化、智能化和一体化的智能制造提供适合您的解决方案。
公司简介
新闻动态
联系我们
2025-07-10
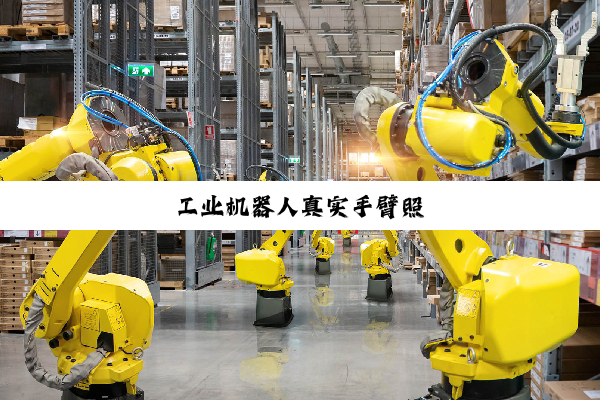
在科技日新月异的今天,机器人手臂的应用已经渗透到我们生活的方方面面。从汽车制造厂的自动化装配线,到医疗领域中的精准手术辅助,再到家庭中的智能助手,机器人手臂以其高效、精准和多功能的特点,成为了现代工业和服务业不可或缺的一部分。据《世界机器人报告2025》显示,全球工业机器人的安装量在过去五年内增长了近50%,而服务机器人的市场需求更是以每年超过20%的速度递增。本文将🌽带你走进机器人手臂的
查看更多
2025-07-09
当我们谈论机器人手臂的长度时,不得不提及其在不同应用场景中的多样性。2025年,日本新能源产业技术综合开发机构(NEDO)与东京工业大学联手,研发出了一款全球最长的多关节机器人手臂,其长度达到了惊人的10米。这款机械臂不仅长度出众,还能够在水平方向上承受10公斤的重量,直径仅为20厘米,整体重量为300公斤。这样的设计使其非常适合在狭窄空间如桥梁、隧道以及核电站内执行精细的检查和搬运任务。相比之下
2025-07-08
ABB作为全球知名的机器人制造商,其生产的机器人手臂广泛应用于工业、医疗、物流等多个领域。ABB的机器人手臂多采用先进的串联式多自由度设计,能模拟人类手臂的灵活运动。常见的ABB机器人手臂按轴数可分为四轴、六轴和七轴等类型。其中,六轴机械臂是最常见的工业机器人,如ABB IRB 120系列,具备六个独立的驱动关节,可在其工作范围内完成任意定位和定向,广泛应用于自动搬运、装配、焊接、喷涂等工业现场。
机器人视觉手臂标定,简而言之,就是确定机器人“手臂”(机械臂末端执行器)与“眼睛”(视觉传感器,如相机)之间的空间关系。通过标定,可以建立相机坐标系与机械臂坐标系之间的转换关系,使机器人能够根据视觉信息精确控制机械臂的运动。在复合机器人的应用中,视觉定位抓取是实现自动化操作的核心技术之一,而手眼标定则是确保这一技术精度的关键步骤。据相关数据显示,未经标定的系统可能存在较大误差,导致抓取失败或精度不
2025
制作乐高机器人手臂,首先需要准备一套乐高积木,特别是包含机械组件的乐高套装,如LEGO EV3系列。接下来,按照以下步骤进行制作: 设计手臂结构:根据需求,设计手臂(bì)的基本结构,包括手腕、手臂主体和手指部分。这通常需要考虑手臂的运动范围、承载能力和动作精度等因素。 搭建手腕部分:手腕是连接手指和手臂的关键部位,需要选择适当的齿轮和传动装置,以实现手指的打开、并拢和抓取物件的功能。 组装手臂主
工(gōng)业(yè)机(jī)器(qì)人(rén)手(shǒu)臂(bì)根(gēn)据(jù)结(jié)构(gòu)形(xíng)式(shì)的(de)不(bù)同(tóng),主要(yào)分(fēn)为(wèi)多(duō)关节(jié)机(jī)械(xiè)手(shǒu)臂(bì)、直(zhí)角(jiǎo)坐(zuò)标(biāo)系(xì)机(jī)械(xiè)手(shǒu)臂
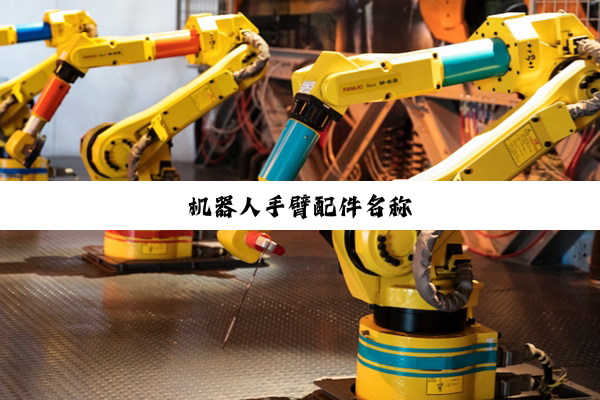
基座,作为机器人手臂的固定部分,是手臂稳定性的基础。它不仅与机器人的主体或工作平台紧密连接,还承受着整个手臂的负载。驱动装置则是为手臂提供动力的核心部件,主要分为电动、液动和气动三种类型。电动驱动以其高效、清洁的特点,在现代工业中广泛应用。例如,某些高端机器人手臂采用伺服电机与驱动器组合,能精确控制手臂的运动,实现高效、精准的操作。二、旋转关节与连杆旋转关节是机器人手臂灵活性的关键所在,它允许手臂
制作液压机器人手臂的第一步是材料准备与初步设计。所需材料主要包括木板、☪️J9九游注射器(作为液压装置)、透明软管、热熔胶、尼龙绑带、牙签(或打头轴)、打孔器等。在设计阶段,需要根据预期的功能和性能要求,绘制出机械臂的框架图,并确定各部件的尺寸和位置。例如,木板的厚度和大小应能支撑整个机械臂的重量,并确保足够的强度和刚度。据最新研究,液压机械臂的设
机器人手臂由多个关节和连杆组成,通过计算机控制,可以模仿人手的运动来执行各种任务。控制策略是机器人手臂有效运作的核心,它决定了机器人的行为、响应速度及精度。不同的控制策略使得机器人能够在特定环境中准确地完成任务。例如,在高速搬运任务中,机器人手臂需要精确控制末端执行器的轨迹和速度,以提高搬运效率并避免物品(pǐn)损(sǔn)坏(huài);而(ér)在(zài)精(jīng)密(mì)装(zhu
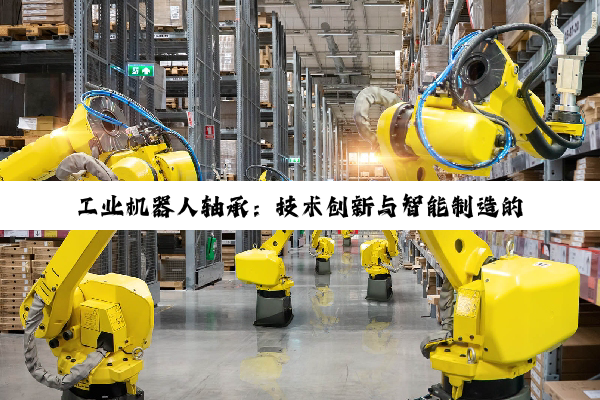
1. 机(jī)器(qì)人(rén)所(suǒ)采用(yòng)的(de)轴(zhóu)承(chéng)种(zhǒng)类(lèi)繁(fán)多(duō),其中薄壁轴承、交叉圆柱滚子轴承、谐波减速器轴承以及关节轴承尤为关键,而交叉滚子轴承更是占据了主导地位。在工业机器人的构造中,这些轴承同样扮演着重要角色,尤其是交叉滚子轴承,其性能直接关🚀乎到机器人的运行精度与稳定性。2. 提及工业机
机器人臂编程模拟的基础在于对机器人运动学理论与实践的深刻理解。这不仅包括对机械臂结构和运动特性的掌握,还涉及到如何通过数学模型精确描述和控制这些运动。据最新数据显示,全球机械臂市场规模已突破数百亿美元大关,并以约12%的年均增长率持续扩张。这一增长背后,是机器人臂编程模拟技术在提高生产效率、降低成本、增强安全性等方面的巨大贡献。例如,在2025世界机器人大会上,机械臂展示了与具身多模态大模型的结合
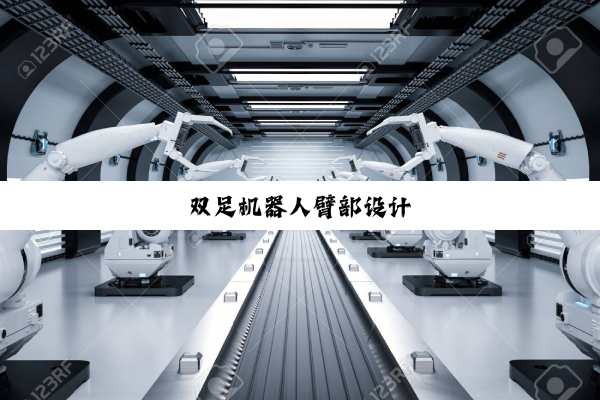
双足机器人的臂部设计是其整体功能性的重要组成部分。臂部的灵活性和精准度直接影响到机器人执行复杂任务🈶的能力。根据最新市场研究报告,2025年全球双足机器人市场规模约为2.44亿美元,预计到2025年将增长至6.97亿美元,年复合增长率达到17.02%。这一增长趋势在很大程度上得益于双足机器人在人机交互、工业应用、医疗护理等领域的广泛应用。臂部设计的优化,如增强关节灵活性、提高末端执行器的精
完善您的信息,J9九游会专业团队为您提供服务!
姓名 *
电话 *
公司名称 *
所属行业*
项目所在城市 *
需求描述 *